Skip to main content
Search
Search This Blog
Милчев! Code and Control
Posts
Showing posts from 2017
Show all
Posted by
Milchev
November 05, 2017
Свързване към Mitsubishi робот посредством TCP/IP протокол
Posted by
Milchev
April 27, 2017
Управление на асинхронен двигател посредством G120 и S7-1200 на фирма Siemens
Posted by
Milchev
February 04, 2017
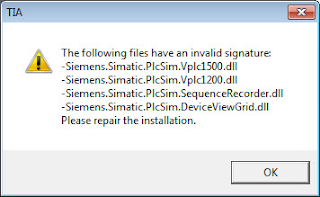
Проблем при стартиране на SIMATIC S7-PLCSIM v13
Posted by
Milchev
January 16, 2017
Актуализация на система с девиаторни ключове. Схема с Smart Relay.
Newer Posts
Older Posts
Home